控制理论

 Clash Royale CLAN TAG#URR8PPP
Clash Royale CLAN TAG#URR8PPP 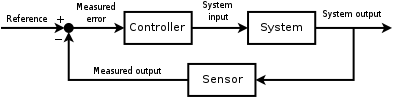
用回授來控制系統動態特性的方塊圖,此處的回授是負回授,因為誤差信號是由目標值減去感測到的數值而得,再經過控制器放大
控制理論是工程學與數學的跨領域分支,主要處理在有輸入信號的動力系統的行為。系統的外部輸入稱為「參考值」,系統中的一個或多個變數需隨著參考值變化,控制器處理系統的輸入,使系統輸出得到預期的效果。
控制理論一般的目的是藉由控制器的動作讓系統穩定,也就是系統維持在設定值,而且不會在設定值附近晃動。
連續系統一般會用微分方程來表示。若微分方程是線性常係數,可以將微分方程取拉普拉斯轉換,將其輸入和輸出之間的關係用傳遞函數表示。若微分方程為非線性,已找到其解,可以將非線性方程在此解附近進行線性化[1]。若所得的線性化微分方程是常係數的,也可以用拉普拉斯轉換得到傳遞函數。
傳遞函數也稱為系統函數或網路函數,是一個數學表示法,用時間或是空間的頻率來表示一個線性常係數系統中,輸入和輸出之間的關係。
控制理论中常用方塊圖來說明控制理论的內容。
目录
1 簡介
1.1 範例
2 歷史
3 對控制理論有重要貢獻的科學家
4 經典控制理論
4.1 閉迴路傳遞函數
4.2 PID控制器
5 現代控制理論
6 控制理論主題
6.1 穩定性
6.2 可控制性及可觀測性
6.3 控制規格
6.4 模型識別及強健性
7 系統分類
7.1 線性系統控制
7.2 非線性系統控制
7.3 分散式系統
8 主要控制策略
9 相關條目
10 參考資料
11 延伸閱讀
12 外部連結
簡介

藉由线性二次高斯反馈(LQG)控制,在雙擺系統上進行平滑的非线性轨迹规划
控制理論是
- 一個研究如何調整動態系統特性的理論。
- 科學中跨學科的領域,起源於工程及數學,逐漸的應用在許多社會科學中,例如心理學、社會學(社會學中的控制理論)、犯罪學及金融系统。
控制系統可以視為具有四種機能的系統:量測、比較、計算及修正。這四個機能可以用五種元素來實現:感測器、換能器、发送器、控制器及最终控制元件。量測機能是由感測器、換能器及发送器執行,在實務應用上,這三個元素會整合在一個單體內,像是電阻溫度計。比較和計算的機能是由控制器執行,可能是電子式的比例控制(P控制)、PI控制、PID控制、雙穩態的遲滯控制,也可能是可编程逻辑控制器(PLC)。早期的控制器也可能是機械式的,像是離心式調速器或是化油器。修正機能是由最终控制元件執行,最终控制元件改變系統的輸出,因此影響操纵或控制的变量。
範例
車輛的巡航定速系統是讓車輛維持在由駕駛者設定的固定參考速度。此時控制器為巡航定速系統,車輛為受控體(plant),而系統是由控制器和車輛所組成,而控制變數是引擎節流閥的位置.會決定引擎可以產生的功率。
一種最單純的作法是當駕駛者啟動巡航定速系統時,固定引擎節流閥的位置。但是若駕駛者在平坦的路面啟動巡航定速系統,車輛在上坡時速度會較慢,車輛在下坡時速度又會較快。這種的控制器稱為開迴路控制器,因為沒有去量測系統輸出(車輛速度)並且影響控制變數(節流閥位置),因此此系統無法去針對車輛遇到的變化(像路面坡度的變動)去進行調整。
在閉迴路控制系統中,利用感測器量測系統輸出(車輛速度),並將資料送入控制器中,控制器依資料調整控制變數(節流閥位置),來達到維持理想系統輸出(使車輛速度和駕駛者設定的參考速度一致)。此時若車輛在上坡時,感測器會量到車輛的速度變慢,因此會調整節流閥位置,加大引擎輸出功率,使馬達加速。因為有量測車輛速度的回授,因此控制器可以配合車輛速度的變化進行動態調整。因此產生了控制系統中的「迴路」範式:控制變數影響系統輸出,而再根據量測到的系統輸出去調整控制變數。
歷史

1768年瓦特蒸氣機上的離心式調速器
雖然許多控制系統在古代時就有了,但此領域較正式的分析是從離心式調速器的動態分析開始的,物理學家詹姆斯·馬克士威在1868年為此撰寫了論文《论调速器》(On Governors)[2] ,其中描述了自激振荡的現象-由於系統時間延遲,使得系統過度補償及不穩定的情形。因此也使得得許多科學家對此議題產生興趣,其中馬克士威的同學愛德華·約翰·羅斯將馬克士威的研究結果抽象化,應用在一般的線性系統中[3],阿道夫·霍维茨在1877年也獨立均分析微分方程的穩定性,其結果即為今日的罗斯-霍维茨定理[4][5]。
動態系統控制的顯著成就是載人的飛行.人類首次成功的載人飛行是由萊特兄弟在1903年12月17日達成的,其卓越之處不只是可以使機翼產生升力(這對當時的研究者是已知的),而是在於可以長時間控制其飛行。若要使飛行時間超過幾秒鐘,對飛機連續、可靠的控制是重要條件之一。
在二次大戰時,控制系統是火控系统、導引系統及相關電子設備的重要組成之一。
有時會用機械的方式來增加系統的穩定性.例如船舶稳定器就是安裝在船舶吃水線以下.橫向張開的鳍片。現在的船舶有用陀螺儀控制的活動鳍片,可以調整攻角,抵抗風或浪作用在船上產生的横摇。
AIM-9響尾蛇飛彈在飛彈後方有一個小的控制表面,其外面是一個旋轉的圓盤,稱為陀螺舵或滚转安定翼。圓盤後的氣流會以高速旋轉,若飛彈開始横摇,圓盤的陀螺力會使控制表面對正氣流,減少横摇的影響。因此響尾蛇飛彈用一個簡單的機械組件代替一個可能非常複雜的控制系統。
太空競賽也和精準的航天控制有關,而許多領域也越來越常用到控制理論,例如經濟學。
對控制理論有重要貢獻的科學家

飛彈後的陀螺舵
許多科學家對控制理論有重要貢獻,包括以下這幾位:
皮埃尔-西蒙·拉普拉斯(1749-1827)在他有關概率论的著作中,發明了Z轉換,現在Z轉換用來處理離散控制系統的問題,Z轉換是拉普拉斯变换的離散等效版本。
亞歷山大·李亞普諾夫(1857–1918)在1890年代開始了穩定性理論的研究。
哈罗德·史蒂芬·布莱克(1898–1983)在1927年提出了负反馈放大器的概念,在1930年代開發了穩定的负反馈放大器。
哈里·奈奎斯特(1889–1976)在1930年代發展了針對回授系統的奈奎斯特稳定判据。
理查德·貝爾曼(1920–1984)在1940年代發展動態規劃。
安德雷·柯爾莫哥洛夫(1903–1987)在1941年共同發展維納–柯爾莫哥洛夫濾波 (1941).
諾伯特·維納(1894–1964)共同發展維納–柯爾莫哥洛夫濾波,並在1940年代提出模控學一詞。
约翰拉加齐尼(1912–1988)在1950年代提出數位控制,並在控制理論中應用加入Z轉換。
列夫·龐特里亞金(1908–1988)提出了龐特里亞金最小值定理及起停式控制。
經典控制理論
為了克服開迴路控制器的限制,在控制理論中導入了回饋。閉迴路的控制器利用迴授來控制動態系統的狀態或輸出。其名稱來自系統中的訊息路徑:程序輸入(例如馬達的電壓)影響程序輸出(例如馬達的電流或轉矩),利用感測器量測輸出,再將量測資料送到控制器中處理,結果送回控制器作為輸入信號之一,因此成為一閉迴路。
相對於開迴路控制器,閉迴路控制器有以下的優點:
- 雜訊抑制能力(像巡航定速中的路面坡度)。
- 即使在數學模型有一些不確定性的情形下(如模型結構和實際系統不是完全符合,或是模型參數和實際數值不是完全一致),仍有一定程度的性能。
- 可以穩定不穩定的系統
- 減少對於參數變動的靈敏度
- 提昇命令追隨(命令變化時,系統配合命令變化)的性能
有些系統中,同時出現開迴路及閉迴路的控制,此時的開迴路會稱為前饋,目的是為了提昇命令追隨的性能。
PID控制器是常見的閉回路控制器架構。
閉迴路傳遞函數
系統的輸出y(t)藉由感測器F量測後,和參考值r(t)相減,控制器C根據參考值和輸出值的誤差e調整受控體P的輸入u,如圖所示,這類的控制器稱為閉迴路控制器。
由於只有一個輸入和輸出,此系統會稱為SISO(單一輸入單一輸出)控制系統。MIMO(多重輸入多重輸出)控制系統是指輸入或輸出不只一個,在實際應用上也很常見,其輸入變數和輸出變數會用向量表示,而不是單一數值的純量。在分布参量系统中,向量可能是無限维的,即一般的函數。

若假設控制器C、受控體P及感測器F都是線性及非時變的(各模組輸入和輸出的關係不隨時間改變),可以將上述系統用拉普拉斯轉換來分析,因此可以得到以下的關係:
- Y(s)=P(s)U(s)displaystyle Y(s)=P(s)U(s),!
- U(s)=C(s)E(s)displaystyle U(s)=C(s)E(s),!
- E(s)=R(s)−F(s)Y(s)displaystyle E(s)=R(s)-F(s)Y(s),!



其中sdisplaystyle s
- Y(s)=(P(s)C(s)1+F(s)P(s)C(s))R(s)=H(s)R(s)displaystyle Y(s)=left(frac P(s)C(s)1+F(s)P(s)C(s)right)R(s)=H(s)R(s),!

表示式H(s)=P(s)C(s)1+F(s)P(s)C(s)displaystyle H(s)=frac P(s)C(s)1+F(s)P(s)C(s),!


PID控制器
PID控制器可能是最常用到的控制器,PID的三個字母分別代表比例、積分和微分三個由誤差值產生控制信號的方式。若u(t)為控制信號,y(t)為量測到的輸出,r(t)為參考輸入,誤差為e(t)=r(t)−y(t)displaystyle e(t)=r(t)-y(t)
- u(t)=KPe(t)+KI∫e(t)dt+KDddte(t)displaystyle u(t)=K_Pe(t)+K_Iint e(t)textdt+K_Dfrac textdtextdte(t)

可以用調整KPdisplaystyle K_P


將PID控制器的方程式進行拉普拉斯轉換,可得:
- u(s)=KPe(s)+KI1se(s)+KDse(s)displaystyle u(s)=K_Pe(s)+K_Ifrac 1se(s)+K_Dse(s)
- u(s)=(KP+KI1s+KDs)e(s)displaystyle u(s)=left(K_P+K_Ifrac 1s+K_Dsright)e(s)


因此PID控制器的傳遞函數如下:
- C(s)=(KP+KI1s+KDs).displaystyle C(s)=left(K_P+K_Ifrac 1s+K_Dsright).

需注意在實務上,PID控制器中不會使用純微分器,一方面在實務上不可行,而且會放大高頻雜訊,容易造成共振。一般會用相位超前的補償器,或是有低通滾降的微分器。
現代控制理論
經典控制理論以頻域分析為主,而現代控制理論利用時域的狀態空間表示法,將系統中的輸入、輸出及狀態變數之間的關係用一階的微分方程表示。為了抽象化輸入、輸出及狀態變數的數量,這些變數一般會用向量來表示,而微分方程或代數方程(當系統是線性時)則會以矩陣形式表示。狀態空間表示法也稱為時域分析,提供一個方便且簡潔的方式針對多重輸入及輸出的系統建模及分析,在有輸入和輸出時,也可以利用拉氏轉換,將系統所有的資料包括在其中。现代控制理論不同於頻域分析,可以分析非線性或不是零初始條件的系統。狀態空間就是指座標軸為狀態變數的空間,系統的狀態可以表示為狀態空間中的一個向量[6]。
控制理論主題
穩定性
在控制理論中的穩定性是指控制系統的狀態在特定條件下,可以維持在一定的範圍內,不會發散,而在什麼範圍內才算是穩定則依系統種類而不同。
- 沒有輸入信號的動力系統,其穩定性是用李雅普諾夫穩定性來描述,也就是任何初始條件在 x0displaystyle x_0
附近的軌跡均能維持在 x0displaystyle x_0
- 有輸入信號的線性系統,其穩定性是用有界輸入有界輸出穩定性(BIBO 穩定性)來描述,針對任何有界的輸入信號,其輸出也是有界。
- 有輸入信號的非線性系統,其穩定性是用輸入-狀態穩定性(input-to-state stability),結合了李雅普諾夫穩定性及類似有界輸入有界輸出穩定性的表示方式。
為了簡單起見,以下的說明是針對連續時間及離散時間的線性非時變系統。
在數學上,一個因果性的系統若要穩定.其傳遞函數的所有極點的實部都要為負值。考量不同的控制系統,穩定的條件是極點滿足以下的條件:
- 若是連續時間系統,使用拉普拉斯轉換來求得傳遞函數,極點都要在複數平面的左半平面。
- 若是離散時間系統,使用Z轉換來求得傳遞函數,極點都要在單位圓內。
兩者的差異是因為拉普拉斯轉換的左半平面,在共形映射後會對應單位圓內的區域。
若滿足上述的條件,一系統即為漸近穩定的系統:漸近穩定控制系統中的變數會由其初值開始,持續的趨近於0,而且不會有一直持續的振盪。一直持續的振盪會出現在極點在虛軸上(連續時間系統)或是其極點大小為1(離散時間系統)。若一個簡單的穩定系統,其響應不會遞減也不是隨時間變大,也不會震盪,此為臨界穩定:系統的傳遞函數在複數平面原點處有不重複的極點。若傳遞函數中,實部為零的極點,其虛部不為零,表示系統在震盪,也是臨界穩定。
若一離散系統的冲激响应為
- x[n]=0.5nu[n]displaystyle x[n]=0.5^nu[n]
![x[n]=0.5^nu[n]](https://wikimedia.org/api/rest_v1/media/math/render/svg/c8218ed6e210d08434124fda2ec8c9d9e2076b2f)
則其Z轉換後的傳遞函數為
- X(z)=11−0.5z−1 displaystyle X(z)=frac 11-0.5z^-1

在z=0.5displaystyle z=0.5
若其冲激响应為
- x[n]=1.5nu[n]displaystyle x[n]=1.5^nu[n]
![x[n]=1.5^nu[n]](https://wikimedia.org/api/rest_v1/media/math/render/svg/358d5218f4de8bf149bee016450cb7dcc107f169)
則其Z轉換後的傳遞函數為
- X(z)=11−1.5z−1 displaystyle X(z)=frac 11-1.5z^-1

在z=1.5displaystyle z=1.5
許多數學工具可以分析系統的極點,其中也有一些是配合圖表分析,像根軌跡、波德圖及奈奎斯特圖。
機械上的調整可以提昇設備(及控制系統)的穩定性。水手會加入壓艙水來提昇船的穩定性,郵輪會加入防侧倾的鳍,從船舷往外延伸10公尺,而持續的繞著其中心軸旋轉,產生一個和侧倾相反的力。
可控制性及可觀測性
可控制性和可觀測性分別是輸入和狀態,輸出和狀態之間的性質。是在分析控制系統,決定控制策略或判斷是否可以使系統穩定時所需要的重要性質。
可控制性是指是可以用適當的控制信號作為輸入,使特定狀態變數的數值變成0,和利用輸入調整狀態變數的能力有關,若一個狀態變數是不可控制的,表示沒有輸入可以調整這一個狀態,若一系統中所有不可控制的狀態變數,其動態特性都是穩定的,則此系統稱為可穩定的(stabilizable)。可觀測性是指可以用輸出的量測及計算得到狀態變數的值,若一個狀態變數是不可觀測的,表示無法確認此一狀態是否穩定,也就無法用此狀態來穩定整個系統。若一系統中所有不可控制的觀測變數都是穩定的,則此系統稱為可检测的(detectable)。
若以幾何觀點來看,若要控制系統中所有的狀態,那些「不好」的狀態都需是可控制且可觀測的,才能確保閉迴路系統的良好特性。若系統中有一個狀態不是可控制且可觀測的,無法在閉迴路系統中調整其動態特性。若此狀態的動態特性是不穩定的,此特性也會出現在閉迴路系統中,因此整個系統也是不穩定的。在狀態空間轉換到傳遞函數時,不可觀測的的極點不會出現在傳遞函數中,因此在一些動力系統分析時,會選擇使用狀態空間表示法。
不可控制或不可觀察的系統,可以用加入致動器或感測器的方式改善。
控制規格
在控制原理的基礎下,已發展出許多不同的控制策略,從非常通用的(PID控制器),到針對特殊系統的控制,尤其是机器人或是航空器的巡航定速控制。
一個控制問題會有許多的規格,其中穩定性是必要條件的,不論系統開迴路穩定性如何,控制器需確保在閉迴路下是穩定的。性能不佳或是調整不當的控制器可能使系統變的不穩定,甚至可能比開迴路還要不穩定,這是应盡量要避免的。
有時會希望在閉迴路下有較快的動態特性,若是線性時不變系統,其穩定性及動態特性可以用傳遞函數極點的位置來表示,極點的實部越小,表示有更快的動態特性,一個穩定系統,其極點λdisplaystyle lambda 
![Re[lambda ]<0](https://wikimedia.org/api/rest_v1/media/math/render/svg/57bd3912e4d0e7aafac442e28a10f4748da7b90d)
![Re[lambda ]<-overline lambda](https://wikimedia.org/api/rest_v1/media/math/render/svg/acd3c480f7bd6fa14fd42e56521994a3b4ad8e2d)

另一個常見的規格是對步階擾動的抑制能力,在受控系統前加入積分器即可達到此一需求,其他種類擾動的抑制能力也可以透過其他的子系統才能達成。
其他「經典」的控制系統規格有些和閉迴路系統的時域響應有關:包括上昇時間(控制系統在擾動後,輸出第一次到達理想數值的時間)、峰值過衝(控制系統在擾動後,穩定之前,輸出的最大值)、安定時間(控制系統輸出維持在理想數值範圍的時間)在擾動後,穩定之前,輸出的最大值)、四分之一衰减响应(quarter-decay)或其他規格。頻域規格一般會和系統的鲁棒性(強健性)有關。
現在的性能指標也包括一些用積分量或其變體表示的追隨誤差,像绝对误差积分(IAE)、绝对時間误差积分(ITAE)、平方误差积分(IAE)、慣量中心(COI)等。
模型識別及強健性
控制系統一定會有一定程度的強健性。控制器一般是依照一個假設的受控系統模組再進行設計,強健性是指一控制器配合的受控系統和原來假設的系統有一點不同,控制器的特性不會有太大的變化。這個規格在實際的控制器中相當重要,因為很少實際系統會完全符合描述它的微分方程,在選擇系統數學模型時,一般會進行簡化,否則數學模型會非常複雜,甚至無法求得一個完整的模型。
- 系統識別
確認受控系統統御方程的程序稱為系統識別。系統識別可以在離線(off-line)時進行,也就是在不是一般運作的情形下進行,例如可以執行一系列的量測程序,計算系統近似數學模型的參數,一般會是系統的傳遞函數或是矩陣。系統識別是利用系統的輸入和輸出進行,因此無法考慮沒有觀測性的系統動態。有時數學模型會直接由已知的物理方程式開始,例如針對有質量、彈簧及阻尼的系統,其數學方程為mx¨(t)=−Kx(t)−Bx˙(t)displaystyle mddot x(t)=-Kx(t)-mathrm B dot x(t)
有些先進的控制技術會有在線(on-line)的系統識別,也就是在一般運作,控制器正常運作的條件下去計算系統模型的參數,當系統參數發生較大的變化(如機械人手臂釋放一重物,負載變輕),控制器可以自動調整,仍然有正常的性能。
- 強健性分析
有關SISO(單一輸入單一輸出)系統的強健性分析,可以利用頻域分析,考慮系統的傳遞函數,利用奈奎斯特图及波德圖來達到,相關主題包括增益裕度及相位裕度及幅值裕度(amplitude margin)。但針對MIMO(多重輸入多重輸出)系統及較複雜的控制系統.需考慮由各控制策略可得到的理論結果,若是需要某一種特別的強健性性質,需考慮可以具有此性筫的控制技術。
- 限制
在強健性需求中有一個較特別的,就是要求在輸入變數及輸出變數均有限制的情形下,控制系統可以正常運作。在真實世界中的信號都是有限的.但有可能控制系統送出的信號超過實際系統的限制,例如要使一個閥以超過其極限速度的速度旋轉,這可能會讓閉迴路系統出現不想要的特性,甚至會使致動器或感測器受損或毀壞。有些特殊的控制技術可以解決此問題,像模型預測控制及反終結(anti-wind up system),後者包括一個特殊的控制方塊,可以確保控制信號不會超過限制值,以避免積分終結的情形。
系統分類
線性系統控制
針對MIMO的系統,極點的指定可以用開迴路系統的狀態空間,再將極點放在指定位置,計算對應的回授矩陣。若在複雜的系統中,上述的程序需要用電腦輔助計算才能達到,而且不保證其強健性。而且一般而言無法量到所有的系統狀態,在極點指定的設計時需加入觀測器(observer)的設計。
非線性系統控制
像機器人學及航天產業中的程序一般都有高度非線性的動態,在控制理論中有時可以用線性化的方式轉換為線性系統,再依線性系統的方式控制。但有時需要用一些可以配合非線性系統使用的非線性控制理論,例如回授線性化、反推控制、滑動模式控制等。轨迹线性化控制一般利用李亞普諾夫穩定性的基礎。微分幾何用做為一數學工具,將許多廣為人知的線性控制概念擴展到非線性控制中,但其中又有其微妙之處,因此變成一個更有挑戰性的問題。
分散式系統
分散控制系統是指一個系統由多個控制器來控制。分散控制有幾個好處,例如可以控制一個位在廣大地理區域的系統,各控制器之間可以用通訊網路彼此交換資料,並協調彼此的行動。
主要控制策略
每一個控制系統首先都要保證其閉迴路特性的穩定性。線性系統可以用極點指定的方式達到。非線性系統一般會根據亞歷山大·李亞普諾夫的理論,來確保系統的穩定性和內部動態無關。控制系統有許多不同的控制規格,是否可以符合所有控制規格則和考慮的系統模型及選擇的控制策略有關。以下是一些主要控制策略的列表:
適應控制會在線識別程序中的參數,或修改控制器的增益,使系統有較佳的強性。適應控制最早在1950年代用在航天產業中,而且應用的非常成功。
分层控制系统是一種設備及控制軟體皆依分层樹方式規劃的控制系統。當樹中的連結用電腦網路來實現時,分层控制系统也可以視為是一種網路控制系統。
智能控制會使用許多人工智慧的方法來控制動態系統,會用到的方式包括人工神经网络、贝叶斯概率、模糊逻辑[7]、机器学习、进化计算及遗传算法等。
最优控制是一種特別的控制技術,控制器產生的控制信號需使某特定「成本指數」最佳化。以太空船為例,噴射引擎需在消耗油量最小的情形下將太空船帶到期望的軌道。有二種最优控制的設計方式廣泛的用在工業應用中,而且已證明這二個方式可以確閉迴路的穩定性。這二種方式分別是模式預測控制(MPC)及線性二次高斯控制(LQG)。第一個方式很明確的考慮系統中信號的限制條件,這是很多工業系統都有的重要特徵,但其中的最佳控制只是作為滿足所有限制的一個方式,不是最优化閉迴路系統中的實際性能指標。配合PID控制器的模式預測控制系統常用在程序控制中。
鲁棒控制明確的在控制器設計時考慮其不確定性。鲁棒控制的控制器可以克服分析用理想系統和實際系統之間的小誤差。亨德里克·韋德·波德和其他早期提出的控制方式有一些鲁棒性。而1960到1970年代提出的狀態空間法則較沒有鲁棒性。現代控制中,由英國劍橋大學的 Duncan McFarlane 和Keith Glover提出的H∞迴路函數整形是一種鲁棒控制。鲁棒控制的目的是要在存在小的模型誤差的情形下達到鲁棒性的性能以及穩定性。
隨機控制是在模型有不確定性的情形下進行控制。在典型的統計控制問題中,會假設在模型及控制器中存在隨機的雜訊及擾動,控制器設計時需考慮這些隨機的變異。
能量整型控制將控制器及受控系統視為是能量轉換的元件,其控制策略是以能量保持的方式互連,以達到所需的特性。
自组织临界控制可定義為試圖用自组织系統耗散能量的方式來影響流程。
相關條目
|
|
|
參考資料
^ Matlab-Find trim point of dynamic system
^ Maxwell, J.C. On Governors. Proceedings of the Royal Society of London. 1868, 16: 270–283. JSTOR 112510. doi:10.1098/rspl.1867.0055. 使用|accessdate=需要含有|url=(帮助)
^ Routh, E.J.; Fuller, A.T. Stability of motion. Taylor & Francis. 1975. 引文使用过时参数coauthors (帮助)
^ Routh, E.J. A Treatise on the Stability of a Given State of Motion, Particularly Steady Motion: Particularly Steady Motion. Macmillan and co. 1877.
^ Hurwitz, A. On The Conditions Under Which An Equation Has Only Roots With Negative Real Parts. Selected Papers on Mathematical Trends in Control Theory. 1964.
^ Donald M Wiberg. State space & linear systems. Schaum's outline series. McGraw Hill. ISBN 0-07-070096-6.
^ Liu, Jie; Wang, Golnaraghi, Kubica. A novel fuzzy framework for nonlinear system control. Fuzzy Sets and Systems. 2010, 161 (21): 2746–2759. 引文使用过时参数coauthors (帮助)
延伸閱讀
Levine, William S. (编). The Control Handbook. New York: CRC Press. 1996. ISBN 978-0-8493-8570-4.
Karl J. Åström and Richard M. Murray. Feedback Systems: An Introduction for Scientists and Engineers. (PDF). Princeton University Press. 2008. ISBN 0-691-13576-2.
Christopher Kilian. Modern Control Technology. Thompson Delmar Learning. 2005. ISBN 1-4018-5806-6.
Vannevar Bush. Operational Circuit Analysis. John Wiley and Sons, Inc. 1929.
Robert F. Stengel. Optimal Control and Estimation. Dover Publications. 1994. ISBN 0-486-68200-5.
Franklin; 等. Feedback Control of Dynamic Systems 4. New Jersey: Prentice Hall. 2002. ISBN 0-13-032393-4. 引文格式1维护:显式使用等标签 (link)
Joseph L. Hellerstein, Dawn M. Tilbury, and Sujay Parekh. Feedback Control of Computing Systems. John Wiley and Sons. 2004. ISBN 0-471-26637-X.
Diederich Hinrichsen and Anthony J. Pritchard. Mathematical Systems Theory I - Modelling, State Space Analysis, Stability and Robustness. Springer. 2005. ISBN 3-540-44125-5.
Andrei, Neculai. Modern Control Theory - A historical Perspective (PDF). 2005 [2007-10-10].
Sontag, Eduardo. Mathematical Control Theory: Deterministic Finite Dimensional Systems. Second Edition (PDF). Springer. 1998. ISBN 0-387-98489-5.
Goodwin, Graham. Control System Design. Prentice Hall. 2001. ISBN 0-13-958653-9.
Christophe Basso. Designing Control Loops for Linear and Switching Power Supplies: A Tutorial Guide.. Artech House. 2012. ISBN 978-1608075577.
For Chemical Engineering
Luyben, William. Process Modeling, Simulation, and Control for Chemical Engineers. Mc Graw Hill. 1989. ISBN 0-07-039159-9.
外部連結
维基共享资源中相关的多媒体资源:控制理论 |
Control Tutorials for Matlab - A set of worked through control examples solved by several different methods.- Control Tuning and Best Practices
- Advanced control structures, free on-line simulators explaining the control theory
| ||||||||||||||||||||||||||
|
